
高分七号卫星数据预处理流程(正射校正、图像融合)
处理环境:ENVI5.6(ENVI5.3.1及以上版本都适用)
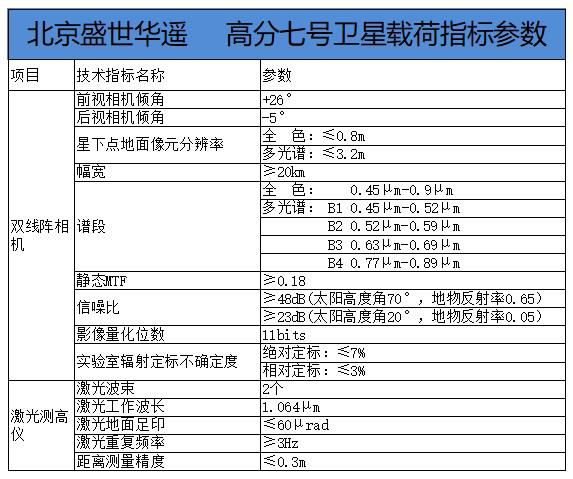
高分七号卫星配置1台双线阵相机和1台激光测高仪,其中,双线阵相机可连续观测获取地面重叠影像,用于获得立体影像。双线阵相机包括前视(+26°倾角)和后视相机(-5°倾角),其中后视相机包括全色和多光谱(近红外、红色、绿色和蓝色波段)。拍摄幅宽优于20km,全色分辨率优于0.8米,多光谱分辨率优于3.2米。
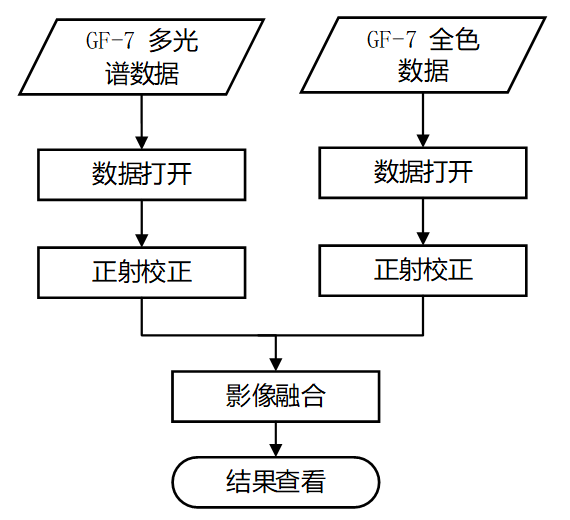
高分七号L1A级数据预处理包括正射校正、图像融合处理,流程图如下所示。



处理环境:ENVI5.6(ENVI5.3.1及以上版本都适用)
高分七号卫星配置1台双线阵相机和1台激光测高仪,其中,双线阵相机可连续观测获取地面重叠影像,用于获得立体影像。双线阵相机包括前视(+26°倾角)和后视相机(-5°倾角),其中后视相机包括全色和多光谱(近红外、红色、绿色和蓝色波段)。拍摄幅宽优于20km,全色分辨率优于0.8米,多光谱分辨率优于3.2米。
高分七号L1A级数据预处理包括正射校正、图像融合处理,流程图如下所示。